车辙是路面质量检测和养护管理中的一项重要指标。长期以来由于中国缺少相应高效的检测技术和仪器,而国外的车辙检测仪器价格一般在数百万元,该指标一直未能列入规范中的必检项目。随着中国高速公路的飞速发展,对高速公路的性能提出了更高的要求,迫切需要对车辙给出客观的检测,科学地指导路面的养护。
目前,国内已引进了多台车辙检测仪,横向布置的传感器有3个、5个或9个等。由于在横向范围内探头数量少,车辙精度难于保证,通过分析多传感器车辙检测原理,提出了一种基于31路激光位移传感器的路面车辙检测方法,给出了车辙计算公式,采用TCP/IP协议进行数据的高速实时传输,可以测量横向3 750 mm宽度范围内的车辙分布,提高了车辙检测结果的可信度,可满足高速公路车辙养护检测需要。
1 检测原理 1.1 多传感器车辙检测原理
多传感器车辙检测原理见图1。在一刚性梁上均匀安装n个激光位移传感器,各传感器之间间距为d0,设在检测标准平面(车辙为0)时,各传感器的输出为hi0(i=1,2,3,...,n),用矩阵z0表示,即 z0=[h10 h20 h30 ...hn0] (1)
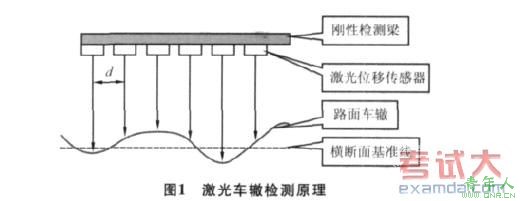
在某一时刻,当检测到断面j时,各传感器的输出为hi j(i=1,2,3,...,n),
用矩阵zj表示,即
zj=[h1j h2j h3j ... hnj] (2)
则该横断面上n个采样点相对于基准平面的高差可表示为以上2个矩阵的差zj- z0
zj- z0=[h1j- h10!h2j- h20!h3j- h30!...!hnj- hn0] (3)
在刚性检测梁平行于横断面基准线时,该断面最大车辙zjmax可近似表示为矩阵zj- z0的最大值max(zj- z0)和最小值min(zj- z0)的差,即
zjmax≈max(zj- z0)- min(zj- z0) (4)
当横梁发生倾斜时,应先对式(3)进行线性变换,再计算最大车辙。
1.2 多传感器车辙检测误差
实际横断面的相对高差可表示为路面宽度x的函数f(x),设断面在x=x1处有最大值,在x=x2处有最小值,则断面最大车辙zjmax可定义为该断面的最大值和最小值之差 zjmax=f(x1)- f(x2)! (0≤x≤3 750 mm) (5)
因此,测量过程中最大车辙测量误差可表示为式(5)和式(4)的差
Δj max=[f(x1)- max(zj- z0)]-[f(x2)- min(zj- z0)] (0≤x≤3 750 mm) (6)
由式(6)可以看出,车辙测量误差由2部分组成,前面一项是由于横断面采样最大值和实际最大值不相等造成的峰值误差,后面一项是由于横断面采样最小值和实际最小值不相等造成的谷值误差。因此,为了减少车辙测量误差,提高车辙检测精度,必须增加位移传感器的个数。通过误差分析,当采用31路传感器检测车辙时,车辙精度可以保证在3%。因此,本文设计了由31路激光位移传感器组成的多路激光路面车辙检测系统
责任编辑:sealion1986